Some photos taken by the UAV toolkit on a recent flight at our gyllyngvase beach test site, using a KAP foil 1.6 kite instead of a drone. Kites have many advantages, no flight licences required, no vibration from engines and a fully renewable power source!

We’re using a 3D printed mounting plate for the phone strung from the top of the single line just below the kite. It needs more wind than we had to get higher altitudes but the first impressions are good. I’ve also added a new trigger mode to the UAV toolkit programming language that remembers the GPS coordinates where all the photos are taken, so it can build up overlapping images even if the movement is harder to control.


The tail of the kite – which turned out to be important for stabilising the flight.


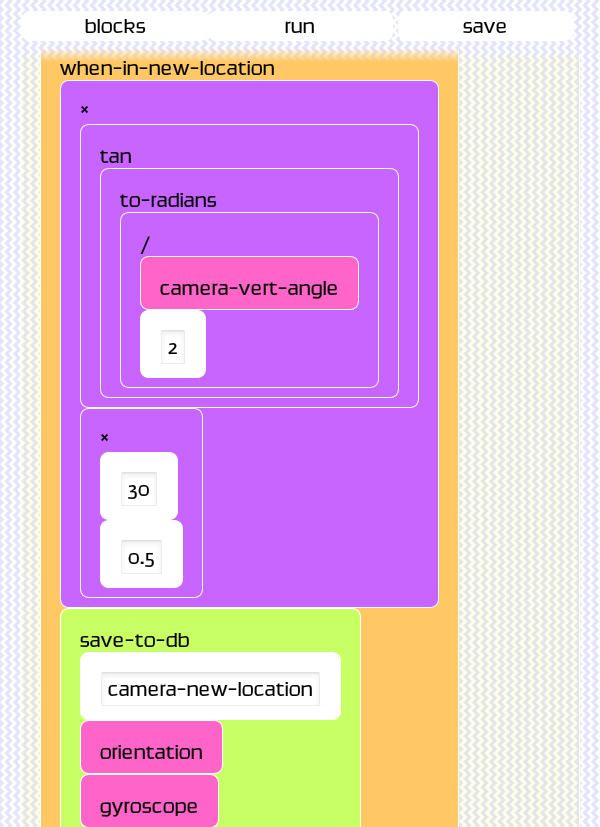
Here is the code using the when-in-new-location trigger to calculate overlap based on the camera angle, gps and altitude – which ideally should be driven somehow by the length of the line. As an aside, this screenshot was taken in the chrome browser which now runs android apps.
Leave a Reply